CAE 입문자도 쉽게 이해할 수 있는 '알기 쉬운 기술 용어집'
CAE 관련 용어를 확인해 보세요.
반도체 / 디스플레이 공정 및 장비 관련 용어를 확인해 보세요.
통신 분야의 다양한 용어를 확인해 보세요.
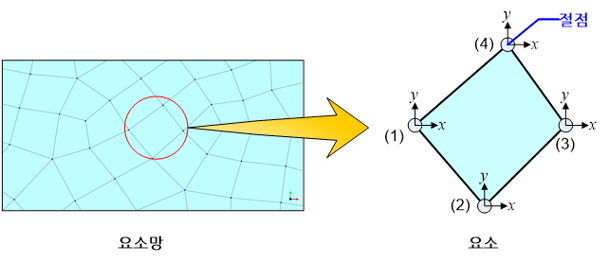
유한요소 해석(finite element analysis)에 있어 필수적인 요소망(mesh)을 구성하는 유한요소(finite element)는 물체의 형상을 유한 개로 나누어 세분화 시킨 작은 기하학적 영역 하나 하나를 일컫는다. 유한요소는 그 형상, 절점 혹은 요소 차수(element order)에 따라 구분된다. 2차원의 경우를 예를 들면, 형상에 따라 삼각형 혹은 사각형 요소로, 차수에 따라 1차, 2차 혹은 고차 요소로 구분된다. 그리고 3-, 4-, 8- 혹은 9-절점 요소로도 구분하는데, 여기서 숫자는 한 요소가 가지는 절점을 나타낸다.
절점의 개수는 요소의 차수와 관련이 있을 뿐더러 해당 요소가 가지는 자유도(degree of freedom) 혹은 미지수의 개수와도 연관이 있다. 예를 들어 1차원에 있어 1차 함수 즉 직선은 양 끝 점의 위치가 결정되면 공간 상에서 그 위치가 고정된다. 이 경우 양 끝 점의 위치는 두 개의 미지수 혹은 자유도에 해당된다.
요소에 있어 절점이란 이러한 개념으로 생각하면 이해하기 쉽다. 즉 4-절점 요소라면 각 절점에 하나의 미지수를 가지므로 총 4개의 미지수를 가지는 요소라고 생각할 수 있다(하지만 물체의 거동이 스칼라가 아닌 벡터의 경우에는 성분들을 지니고 있기 때문에 한 절점에서 벡터의 성분개수 만큼의 미지수를 가질 수 있음에 유의).
예를 들어, 4-절점 요소로 온도 분포를 계산하는 경우에는 각 절점에 하나의 온도 값을 미지수로 하기 때문에 이 요소는 총 4개의 미지수를 갖는다. 하지만 4-절점 요소로 2차원 속도 분포를 계산하는 경우에는 각 절점에서 x 및 y방향 속도 성분을 미지수로 가지므로 이 요소는 총 8개의 미지수를 가진다.
요소망 내 인접한 요소들은 같은 위치에 있는 절점들을 서로 공유한다. 이를 통해서 요소망 내 모든 요소들은 서로 연결되어 하나의 유기적인 네트워크를 형성하게 된다. > 절점 더 자세히 보기🔎
보 형상의 가느다란 부재의 역학적 거동을 많은 가정을 통하여 가장 단순하게 수학적으로 표현한 오일러 보 이론(Euler beam theory)을 토대로 하는 1차원 보 요소(beam element)이다. 오일러 보 이론은 18세기 스위스의 위대한 수학자인 오일러(1707~1783)와 그의 스승 베르누이(Bernolli)에 의하여 탄생하였다.
이 이론에서는 보 형상 구조물의 처짐(deflection)은 외부에서 가한 일과 구조물 내부에 저장되는 굽힘 변형에너지는 같다는 원리로부터 유도된다. 하지만 구조물의 횡 전단 변형에너지는 무시되기 때문에 구조물의 두께가 길이에 비해 현저히 작지 않은 경우에는 정확도가 떨어지는 단점이 있다. 하지만 오일러 보 이론은 이론적인 해답을 제공하기 때문에 공학분야에서 직면하는 많은 보 구조물의 처짐량을 계산할 때 참고가 되는 해를 제공해 준다.
오일러 보 이론에서는 보의 처짐이 4차 미분방정식으로 표현되고, 이것을 유한요소(finite element)로 구현하기 위해서 한 절점이 가져야 할 자유도(degree of freedom)는 구조물의 처짐과 처짐의 기울기이다. 참고로 이 이론은 그 이후 러시아의 공학자인 티모센코(Timoshenko)에 의하여 개선되었으며, 이 개선된 보 이론을 티모센코 보(Timoshenko beam) 이론이라고 부른다.
.
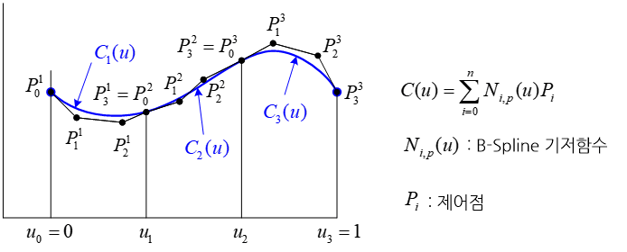
스플라인(spline)은 일차원 혹은 다차원 Data를 보간(interpolation) 혹은 곡선 맞춤(curve fitting)을 위해 사용되는 광범위한 종류의 함수들을 일컫는다. 수학적으로는 구간별로 정의된 미분 가능한 다항함수(polynomial)들로 연결된 하나의 특별한 함수를 의미한다. 스플라인이라는 용어는 선체의 곡면 작업을 위하여 사용되는 특수한 도구의 이름으로부터 명명되었다. 그 중에서도 비-스플라인은 주어진 곡선의 자유도(degree of freedom), 매끈한 정도(smoothness) 그리고 구간 분할(domain partition)에 대하여 최소 한도로 정의되는 스플라인이다. 따라서, 어떠한 스플라인 함수라도 비-스플라인 함수들의 선형조합(linear combination)으로 표현이 가능하다.
비-스플라인이라는 이름은 쇼엔버그(Schoenberg)에 의하여 지어졌으며, 모든 스플라인 함수들을 표현할 수 있는 기저 스플라인에 해당될뿐더러 베지어 곡선(Bezier curve)의 일반형으로 생각할 수 있다. 비-스플라인 곡선은 제어점(control point)과 기저 비-스플라인 함수(basis B-spline function)들의 선형조합으로 표현되며, 기저가 되는 비-스플라인 함수들의 차수에 따라 그 차수가 결정된다. 참고로 기저가 되는 비-스플라인 함수들의 차수가 모두 동일한 경우를 특히 균일 차수(uniform order) 비-스플라인이라고 부른다.
.
보(beam)는 길이가 상대적으로 긴 사각단면 구조물에 대한 수학적인 모델을 의미하는 추상적인 구조물(abstract structure)이다. 보나 기둥(column)은 기하학적인 측면에서 단면에 비해 길이가 상대적으로 긴 가느다란 부재이다. 하지만 외부에서 가해지는 하중이 축 방향인 경우를 기둥이라고 하고 그렇지 않은 경우를 보로 구분하고 있다. 보와 같은 부재의 거동을 모사하기 위한 수학적 표현, 또한 수학적 이론 그리고 이 이론에 따라 만들어 진 유한요소(finite element)에는 몇 가지 유형이 있다.
우선 차원(dimension)에 따라 1차원, 2차원 그리고 3차원 보요소로 나뉜다. 요소의 형상은 공통적으로 직선이지만 보 요소의 각 절점(node)이 가지는 자유도(degree of freedom)는 각기 다르다. 3차원 보 요소는 한 절점에서 세 직교 방향으로의 병진 자유도를 가지는 반면, 2차원 보 요소는 한 절점에서 보의 축 방향과 하중작용 방향으로의 병진 자유도만이 정의되어 있다. 한편, 1차원 보 요소의 경우에는 하중 방향으로의 횡 전단변형률(transverse shear strain)을 반영하느냐 그렇지 않느냐에 따라 구분된다. 이 것을 무시하게 되면 가장 단순한 오일러 보(Euler beam) 요소가 되는데, 이 경우에는 한 절점에서 보의 처짐만이 자유도로 정의된다.
횡 전단변형률을 포함한 경우가 티모센코 보(Timoshenko beam) 요소로서, 한 절점에서 보의 처짐과 기울기를 자유도로 가진다. 보 요소는 요소와 요소 사이에서 부재의 기울기가 연속적이지 않은 봉 요소(rod element)와는 확연히 구분된다.
.
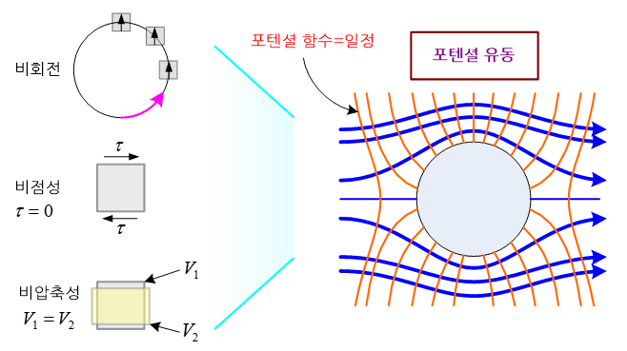
공기와 같은 유체의 유동은 압축성(compressibility), 점성(viscosity) 그리고 유체입자의 회전성(rotational) 중에서 어떠한 효과가 중요시 되느냐 아니면 무시할 수 있느냐에 따라 분류할 수 있다. 압축성 유동(compressible flow)에서는 유동입자의 밀도변화가 현저한 경우이며, 점성유동(viscous flow)은 유체입자 사이의 점성효과가 지배적인 경우이다.
그런데, 이 세가지 효과를 모두 무시한 유동을 이상유동(ideal flow)이라고 정의하며, 유체속도를 어떤 함수의 위치에 따른 변화율로 표현할 수 있다. 이 함수를 속도 포텐셜(velocity potential)이라고 부르며, 유체의 속도나 압력을 속도 포텐셜로 전환하여 표현할 수 있다는 측면에서 포텐셜 유동이라고도 부른다. 압축성만을 반연한 이상유동인 오일러 유동(Euler flow)과는 차이가 있다.
포텐셜 유동은 흐름의 양상이 복잡하지 않고 또한 속도가 완만한 경우에 많이 적용되고 있다. 예를 들어, 액체 저장탱크 내 액체의 출렁임이나 배 주위 바다물의 흐름 등은 포텐셜 유동으로 가정하여도 큰 무리가 따르지 않는다.
수치해석적인 측면에서 포텐셜 유동의 가장 큰 장점은 요소망(mesh) 혹은 그리드(grid) 내부 각 절점(node)이 하나의 자유도(degree of freedom)만을 갖는다는 점이다. 따라서 근사해를 구하기 위해 풀어야 할 행렬 방정식의 크기를 대폭적으로 감소시킬 수 있다. 최근 해석분야에서 크게 관심이 되고 있는 유체-구조 연성해석(fluid-structure interaction analysis)에서 해석시간 단축을 위해 유체유동을 포텐셜 유동으로 가정한 경우가 많다.
.
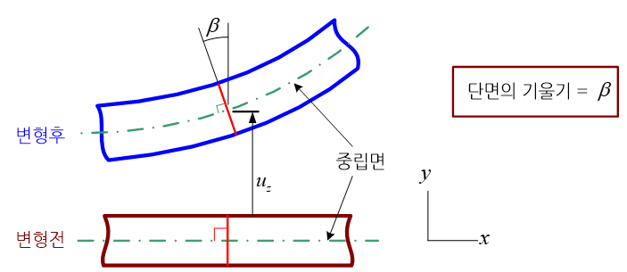
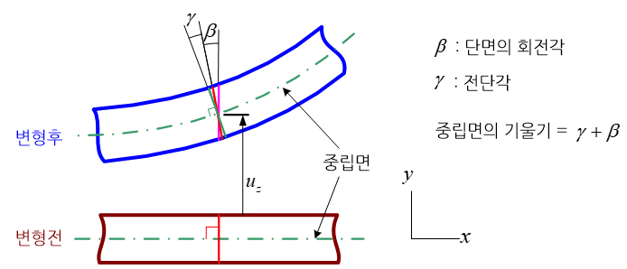
막대 형상을 지닌 구조물(beam-like structure)의 횡방향 처짐에 관한 거동을 모사하기 위한 공학적 이론들은 이미 오래 전부터 연구되어 왔다. 그 중에서 가장 기초가 되는 이론은 오일러 보(Euler beam) 이론은 부재 내 두께방향으로의 횡전단 변형(transverse shear deformation)을 무시하고 단순히 굽힘에 의한 변형만을 반영하고 있다.
하지만 부재의 길이에 대한 상대적인 두께비가 증가할수록 두께 방향으로의 전단 변형은 증가하기 때문에 오일러 보 이론의 정확성은 감소한다. 따라서 이러한 단점을 보완하기 위한 보 이론이 바로 티모센코 보 이론으로서, 러시아 출신 응용역학자인 티모센코(Timoshenko, 1878-1972)에 의하여 최초로 제안되었다.
티모센코 보 이론에서는 보의 처짐과 보의 기울기를 미지수로 하고 있으며, 그 결과 티모센코 보 요소는 한 절점(node)에서 처짐과 보의 기울기를 자유도(degree of freedom)로 가지고 있다. 참고로, 횡 전단 변형률을 무시한 오일러 보에서는 보의 기울기와 단면의 기울어짐 각도가 같다고 가정하고 있기 때문에 모의 기울기를 별도의 미지수로 가지지 않는다.
.
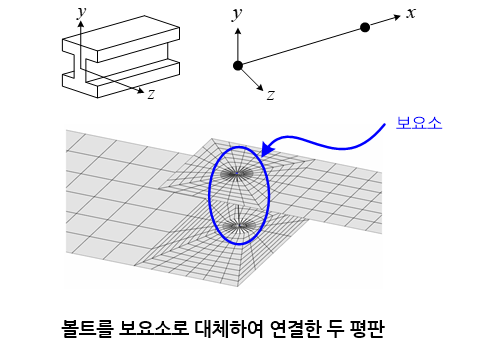
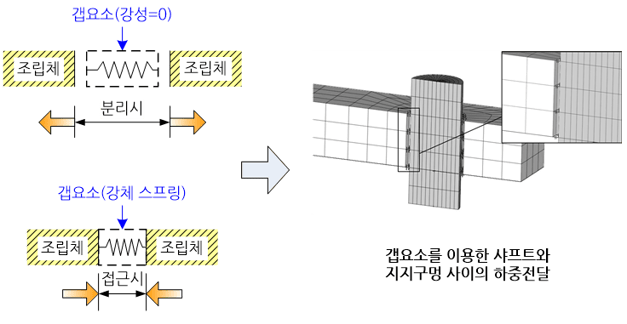
고정된 부시(bush) 속에서 회전하는 기어 축 사이에는 미소한 크기일지라도 항상 간격(gap)이 존재하고 두 물체의 움직임에 따라 이 간격의 크기는 변화한다. 두 물체가 접촉하게 되면 서로 밀어 내려는 반발력이 발생하고 이로 인해 서로 밀게 되어 다시 간격이 생기게 되는 반복과정이 지속된다. 이러한 두 물체 사이 간격과 반발력의 거동을 수치해석(numerical analysis)적으로 구현하기 위하여 몇 가지 기법들이 사용되고 있다. 그 가운데 가장 간단하고 효과적인 기법이 바로 갭 요소를 사용하는 것이다.
갭 요소는 선 요소(line element)의 특수한 경우로서, 이 요소가 지니고 있는 강성(stiffness), 자유도(degree of freedom) 그리고 방향성에 따라 표현할 수 있는 거동이 좌우된다. 예를 들어, 두 물체 사이의 간격이 항상 일정하게 유지되어야 한다면 강성을 무한대로 설정하여야 하고, 간격이 유동적이라면 적절한 강성을 부여하여야 한다. 그리고 반발력만 존재하는 접촉이라면 수직방향 압축력에만 저항하도록 자유도를 한정시켜야 한다. 유한요소 해석(finite element analysis)에 있어 갭 요소는 두 물체의 요소망(mesh) 내에서 실제로 접촉이 예상되는 경계 영역 상의 상호 절점(node)들을 각각 갭 요소로 연결하고, 접촉 거동에 적합한 강성과 자유도 그리고 방향을 설정하면 된다.
.
한 쪽 끝이 벽에 고정되어 있는 특정한 단면적을 가진 나무판자의 다른 쪽 끝에 수직으로 충격하중을 가하면 특정한 형상으로 아래 위로 진동하게 된다. 그리고 끝 단에 가해지는 충격하중을 얼마나 빠르게 그리고 얼마나 큰 힘으로 가하는가에 따라 진동하는 막대의 모양은 달라진다. 외부로부터 동적인 하중을 받는 물체의 진동은 물체의 강성(stiffness)에 의한 복원력과 질량에 따른 관성력(inertia)의 상호작용에 의한 결과이다.
한편, 나무막대와 같이 내부가 꽉 채워진 탄성체는 무한개의 질점(point mass)과 무한개의 스프링이 서로 연결된 동적 시스템으로 생각할 수 있다. 따라서, 이러한 탄성체, 전문용어로 연속체(continuum body)는 무한개의 자유도(degree of freedom)를 가지고 있고, 그 결과 물체의 고유한 진동형상, 즉 모드형상(mode shape) 역시 무한개이다. 이러한 물체의 고유모드와 각 고유모드에 해당하는 고유진동수(natural frequency)를 구하는 것을 모드해석(modal analysis)이라고 부른다. 한편, 무한개의 고유모드를 가지는 연속체를 유한개의 유한요소(finite element)로 요소망(mesh)을 생성하면 요소망의 자유도 개수만큼 고유모드를 가지는 한정된 동적 시스템으로 축소된다.
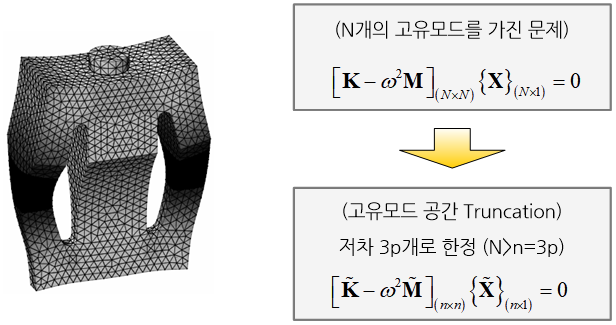
하지만 유한개의 고유모드를 수치해석으로 계산하는 일도 요소망 내 유한요소의 개수가 많을 경우 계산시간의 문제로 쉽지는 않다. 그렇지만, 구조물의 진동에 미치는 고유모드의 영향력은 고차 고유모드로 갈수록 줄어든다. 따라서, 진동분석을 위해 모든 고유모드가 필요로 하는 것은 아니며, 진동분석의 목적에 따라 특정한 개수의 저차 고유모드로 한정된다.
n개의 고유모드를 풀기 위해 필요한 (nxn)크기의 고유치 행렬방정식을 N개의 저차 고유모드만을 풀기 위해 필요한 (NxN) 행렬방정식으로 축소시키는 수치 알고리듬을 란초스 알고리듬이라고 부른다. 한편 주의할 점은 N개의 저차 고유모드만이 필요하다고 N개의 고유모드만을 가지는 엉성한 요소망을 생성하여 고유모드를 구해서는 안 된다. 란초스 알고리듬은 20세기에 개발한 10대 수치기법들 중 하나로, 아인슈타인의 조수이자 상대성 이론 연구를 도왔던 헝가리 수학자 란초스(Lanczos, 1893-1974)에 의해 개발되었다.
.
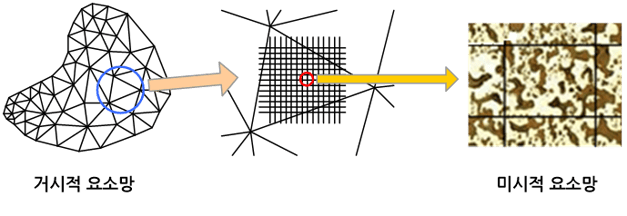
스케일(scale)이라고 하면 눈금 혹은 규모라는 의미로 생각할 수 있다. 예를 들어, 구조물의 전반적인 변형을 관찰하는 것은 거시적(macroscopic)인 스케일이 큰 분석이다. 하지만, 구조물의 극히 국부적인 영역에서의 물체 내부의 미세한 균열(crack)을 현미경을 통해 관찰하는 것은 미시적(microscopic)인 스케일이 매우 작은 분석이다. 구조물의 변형, 유체의 유동, 물체내 열전달, 전자기 현상 등과 같은 지금까지 거의 대부분의 유한요소해석(finite element analysis)은 거시적 관점에서의 해석이었다.
하지만 최근 분자동역학(molecular dynamics)이나 양자역학(quantum mechanics)에 기초를 둔 마이크로(micro) 혹은 나노해석(nano-scale analysis)이 급증하고 있다. 이러한 해석은 물체 내 입자 혹자 원자 단위의 거동을 분석하는 스케일이 아주 작은 분석이다. 멀티 스케일 해석이라 함은 하나의 해석 문제에 있어 특정 영역은 미세한 스케일을 그리고 나머지 영역은 거시적인 스케일로 그 거동을 분석하는 최신의 수치기법(numerical analysis)을 일컫는다. 예를 들어, 균열이 존재하는 금속 부재를 분석하는 경우, 균열을 포함한 국부적인 영역에는 마이크로 혹은 나노 수준의 모델링을, 그리고 그 나머지 영역에는 기존의 연속체 역학(continuum mechanics)에 기초한 모델링을 혼합하는 경우이다.
이러한 경우에 있어 미시적인 모델링과 거시적인 모델링 사이의 계면에는 엄청난 스케일의 차이가 존재하고 이것을 처리하기 위한 연계기법이 필요하게 된다. 다시 말해, 거시적인 영역에서의 유한요소(finite element)와 미시적 영역에서의 요소는 현저한 크기 차이로 인해 두 요소를 연결하기 위한 특별한 기법이 요구된다. 또 다른 문제점은 두 영역에 적용되는 지배방정식이라 불리는 수학적 표현식이 다르다는 점이다. 그 결과 두 영역에서의 자유도(degree of freedom)는 근본적으로 그 성질이 다르므로 이들을 연결하기 위한 특별한 상관 관계식이 요구된다.
.